Java岗大厂面试百日冲刺【Day12】—— 集合框架2(HashMap)
本文已获得原作者 _陈哈哈 授权并经过重新整理规划后发布。
本栏目Java开发岗高频面试题主要出自以下各技术栈:Java基础知识、集合容器、并发编程、JVM、Spring全家桶、MyBatis等ORMapping框架、MySQL数据库、Redis缓存、RabbitMQ消息队列、Linux操作技巧等。
面试题1:说一下 HashMap 的实现原理?
众所周知,HashMap是一个用于存储Key-Value键值对的集合,每一个键值对也叫做Entry(包括Key-Value),其中Key 和 Value 允许为null。这些个键值对(Entry)分散存储在一个数组当中,这个数组就是HashMap的主干。另外,HashMap数组每一个元素的初始值都是Null。

值得注意的是:HashMap不能保证映射的顺序,插入后的数据顺序也不能保证一直不变(如扩容后rehash)。
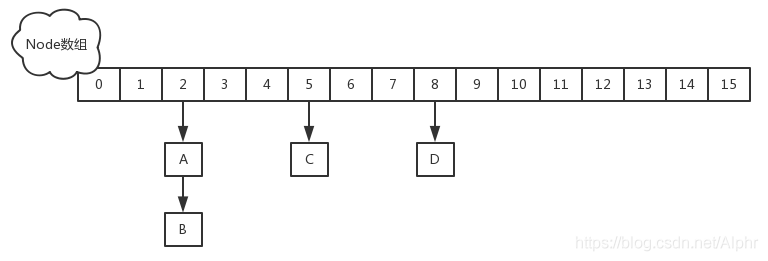
要说HashMap的原理,首先要先了解他的数据结构
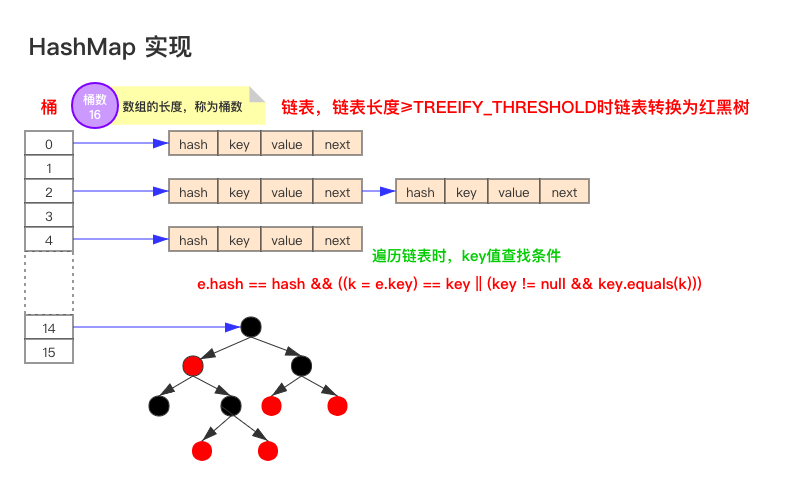
如上图为JDK1.8版本的数据结构,其实HashMap在JDK1.7及以前是一个“链表散列”的数据结构,即数组 + 链表的结合体。JDK8优化为:数组+链表+红黑树。
我们常把数组中的每一个节点称为一个桶。当向桶中添加一个键值对时,首先计算键值对中key的hash值(hash(key)),以此确定插入数组中的位置(即哪个桶),但是可能存在同一hash值的元素已经被放在数组同一位置了,这种现象称为碰撞,这时按照尾插法(jdk1.7及以前为头插法)的方式添加key-value到同一hash值的元素的最后面,链表就这样形成了。
当链表长度超过8(TREEIFY_THRESHOLD - 阈值)时,链表就自行转为红黑树。
注意:同一hash值的元素指的是key内容一样么?不是。根据hash算法的计算方式,是将key值转为一个32位的int值(近似取值),key值不同但key值相近的很可能hash值相同,如key=“a”和key=“aa”等。
通过上述回答的内容,我们明显给了面试官往深入问的多个诱饵,根据我们的回答,下一步他多可能会追问这些问题:
- 如何实现HashMap的有序?
- put方法原理是怎么实现的?
- 扩容机制原理 → 初始容量、加载因子 → 扩容后的rehash(元素迁移)
- 插入后的数据顺序会变的原因是什么?
- HashMap在JDK1.7-JDK1.8都做了哪些优化?
- 链表红黑树如何互相转换?阈值多少?
- 头插法改成尾插法为了解决什么问题?
而我们,当然是提前准备好如何回答好这些问题!当你的回答超过面试同学的认知范围时,主动权就到我们手里了。
如何实现HashMap的有序?
使用LinkedHashMap 或 TreeMap。
LinkedHashMap内部维护了一个单链表,有头尾节点,同时LinkedHashMap节点Entry内部除了继承HashMap的Node属性,还有before 和 after用于标识前置节点和后置节点。可以实现按插入的顺序或访问顺序排序。
/**
* The head (eldest) of the doubly linked list.
*/
transient LinkedHashMap.Entry<K,V> head;
/**
* The tail (youngest) of the doubly linked list.
*/
transient LinkedHashMap.Entry<K,V> tail;
//将加入的p节点添加到链表末尾
private void linkNodeLast(LinkedHashMap.Entry<K,V> p) {
LinkedHashMap.Entry<K,V> last = tail;
tail = p;
if (last == null)
head = p;
else {
p.before = last;
last.after = p;
}
}
//LinkedHashMap的节点类
static class Entry<K,V> extends HashMap.Node<K,V> {
Entry<K,V> before, after;
Entry(int hash, K key, V value, Node<K,V> next) {
super(hash, key, value, next);
}
}
示例代码:
public static void main(String[] args) {
Map<String, String> linkedMap = new LinkedHashMap<String, String>();
linkedMap.put("1", "占便宜");
linkedMap.put("2", "没够儿");
linkedMap.put("3", "吃亏");
linkedMap.put("4", "难受");
for(linkedMap.Entry<String,String> item: linkedMap.entrySet()){
System.out.println(item.getKey() + ":" + item.getValue());
}
}
输出结果:
1:占便宜
2:没够儿
3:吃亏
4:难受
那TreeMap怎么实现有序的?
TreeMap是按照Key的自然顺序或者Comprator的顺序进行排序,内部是通过红黑树来实现。
- TreeMap实现了SortedMap接口,它是一个key有序的Map类。
- 要么key所属的类实现Comparable接口,或者自定义一个实现了Comparator接口的比较器,传给TreeMap用于key的比较。
TreeMap<String, String> map = new TreeMap<String, String>(new Comparator<String>() {
@Override
public int compare(String o1, String o2) {
return o2.compareTo(o1);
}
});
put方法原理是怎么实现的?
该条问答摘自 安琪拉的博客
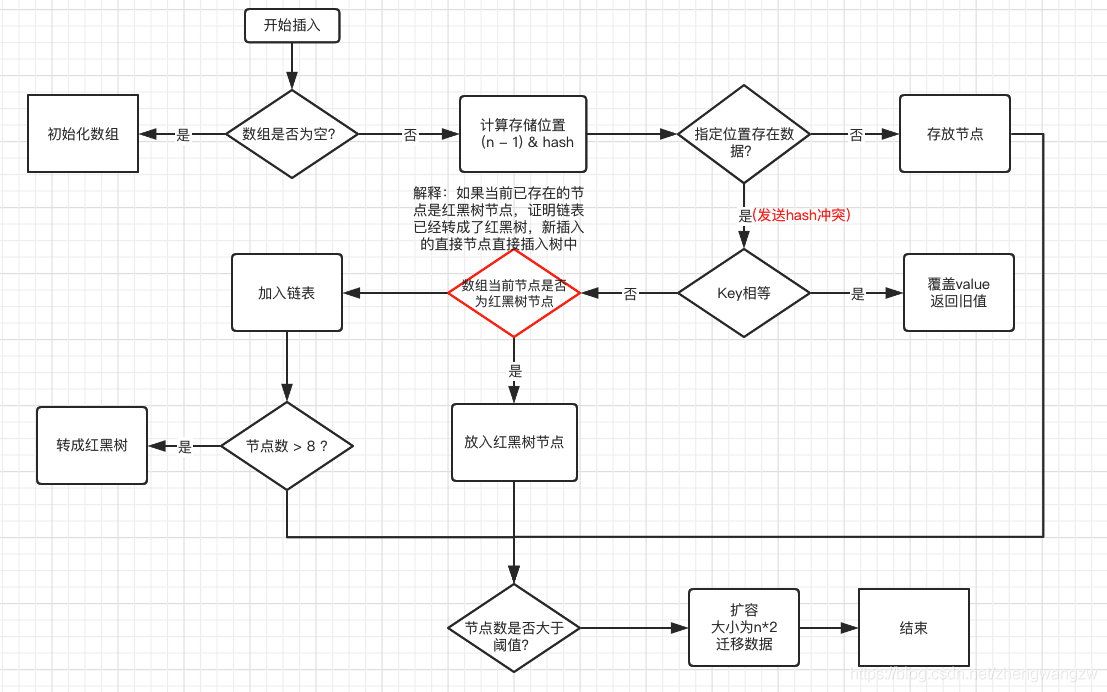
- 判断数组是否为空,
为空进行初始化; - 不为空,计算 k 的 hash 值,通过(n - 1) & hash计算应当存放在数组中的下标 index;
- 查看 table[index] 是否存在数据,没有数据就构造一个Node节点存放在 table[index] 中;
存在数据,说明发生了hash冲突(存在二个节点key的hash值一样), 继续判断key是否相等,相等,用新的value替换原数据(onlyIfAbsent为false);- 如果不相等,判断当前节点类型是不是树型节点,如果是树型节点,创造树型节点插入红黑树中;(如果当前节点是树型节点证明当前已经是红黑树了)
- 如果不是树型节点,创建普通Node加入链表中;判断链表长度是否大于 8并且数组长度大于64, 大于的话链表转换为红黑树;
- 插入完成之后判断当前节点数是否大于阈值,如果大于开始扩容为原数组的二倍。
下面我们看看源码中的内容:
/**
* 将指定参数key和指定参数value插入map中,如果key已经存在,那就替换key对应的value
*
* @param key 指定key
* @param value 指定value
* @return 如果value被替换,则返回旧的value,否则返回null。当然,可能key对应的value就是null。
*/
public V put(K key, V value) {
//putVal方法的实现就在下面
return putVal(hash(key), key, value, false, true);
}
从源码中可以看到,put(K key, V value)可以分为三个步骤:
- 通过hash(Object key)方法计算key的哈希值。
- 通过putVal(hash(key), key, value, false, true)方法实现功能。
- 返回putVal方法返回的结果。
那么看看putVal方法的源码是如何实现的?
/**
* Map.put和其他相关方法的实现需要的方法
*
* @param hash 指定参数key的哈希值
* @param key 指定参数key
* @param value 指定参数value
* @param onlyIfAbsent 如果为true,即使指定参数key在map中已经存在,也不会替换value
* @param evict 如果为false,数组table在创建模式中
* @return 如果value被替换,则返回旧的value,否则返回null。当然,可能key对应的value就是null。
*/
final V putVal(int hash, K key, V value, boolean onlyIfAbsent,boolean evict) {
Node<K,V>[] tab; Node<K,V> p; int n, i;
//如果哈希表为空,调用resize()创建一个哈希表,并用变量n记录哈希表长度
if ((tab = table) == null || (n = tab.length) == 0)
n = (tab = resize()).length;
//如果指定参数hash在表中没有对应的桶,即为没有碰撞
if ((p = tab[i = (n - 1) & hash]) == null)
//直接将键值对插入到map中即可
tab[i] = newNode(hash, key, value, null);
else {
Node<K,V> e; K k;
//如果碰撞了,且桶中的第一个节点就匹配了
if (p.hash == hash &&
((k = p.key) == key || (key != null && key.equals(k))))
//将桶中的第一个节点记录起来
e = p;
//如果桶中的第一个节点没有匹配上,且桶内为红黑树结构,则调用红黑树对应的方法插入键值对
else if (p instanceof TreeNode)
e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
//不是红黑树结构,那么就肯定是链式结构
else {
//遍历链式结构
for (int binCount = 0; ; ++binCount) {
//如果到了链表尾部
if ((e = p.next) == null) {
//在链表尾部插入键值对
p.next = newNode(hash, key, value, null);
//如果链的长度大于TREEIFY_THRESHOLD这个临界值,则把链变为红黑树
if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
treeifyBin(tab, hash);
//跳出循环
break;
}
//如果找到了重复的key,判断链表中结点的key值与插入的元素的key值是否相等,如果相等,跳出循环
if (e.hash == hash &&
((k = e.key) == key || (key != null && key.equals(k))))
break;
//用于遍历桶中的链表,与前面的e = p.next组合,可以遍历链表
p = e;
}
}
//如果key映射的节点不为null
if (e != null) { // existing mapping for key
//记录节点的vlaue
V oldValue = e.value;
//如果onlyIfAbsent为false,或者oldValue为null
if (!onlyIfAbsent || oldValue == null)
//替换value
e.value = value;
//访问后回调
afterNodeAccess(e);
//返回节点的旧值
return oldValue;
}
}
//结构型修改次数+1
++modCount;
//判断是否需要扩容
if (++size > threshold)
resize();
//插入后回调
afterNodeInsertion(evict);
return null;
}
HashMap扩容机制原理
capacity 即容量,默认16。 loadFactor 加载因子,默认是0.75 threshold 阈值。阈值=容量*加载因子。默认12。当元素数量超过阈值时便会触发扩容。
- 一般情况下,当元素数量超过阈值时便会触发扩容(调用resize()方法)。
- 每次扩容的容量都是之前容量的2倍。
- 扩展后Node对象的位置要么在原位置,要么移动到原偏移量两倍的位置。
这里我们以JDK1.8的扩容为例:
HashMap的容量变化通常存在以下几种情况:
- 空参数的构造函数:实例化的HashMap默认内部数组是null,即没有实例化。
第一次调用put方法时,则会开始第一次初始化扩容,长度为16。 - 有参构造函数:用于指定容量。会根据指定的正整数找到不小于指定容量的2的幂数,将这个数设置赋值给阈值(threshold)。第一次调用put方法时,会将阈值赋值给容量,然后让
阈值 = 容量 x 加载因子。(因此并不是我们手动指定了容量就一定不会触发扩容,超过阈值后一样会扩容!!) - 如果不是第一次扩容,则容量变为原来的2倍,阈值也变为原来的2倍。(容量和阈值都变为原来的2倍时,加载因子0.75不变)
此外还有几个点需要注意:
- 首次put时,先会触发扩容(算是初始化),然后存入数据,然后判断是否需要扩容;可见首次扩容可能会调用两次resize()方法。
- 不是首次put,则不再初始化,直接存入数据,然后判断是否需要扩容;
扩容时,要扩大空间,为了使hash散列均匀分布,原有部分元素的位置会发生移位。
JDK7的元素迁移
JDK7中,HashMap的内部数据保存的都是链表。因此逻辑相对简单:在准备好新的数组后,map会遍历数组的每个“桶”,然后遍历桶中的每个Entity,重新计算其hash值(也有可能不计算),找到新数组中的对应位置,以头插法插入新的链表。
这里有几个注意点:
- 是否要重新计算hash值的条件这里不深入讨论,读者可自行查阅源码。因为是头插法,因此新旧链表的元素位置会发生转置现象。
- 元素迁移的过程中在多线程情境下有可能会触发死循环(无限进行链表反转)。
JDK1.8的元素迁移
JDK1.8则因为巧妙的设计,性能有了大大的提升:由于数组的容量是以2的幂次方扩容的,那么一个Entity在扩容时,新的位置要么在原位置,要么在原长度+原位置的位置。原因如下图:

数组长度变为原来的2倍,表现在二进制上就是多了一个高位参与数组下标确定。此时,一个元素通过hash转换坐标的方法计算后,恰好出现一个现象:最高位是0则坐标不变,最高位是1则坐标变为“10000+原坐标”,即“原长度+原坐标”。如下图:

因此,在扩容时,不需要重新计算元素的hash了,只需要判断最高位是1还是0就好了。
JDK8的HashMap还有以下细节需要注意:
- JDK8在迁移元素时是正序的,不会出现链表转置的发生。
- 如果某个桶内的元素超过8个,则会将链表转化成红黑树,加快数据查询效率。
HashMap在JDK1.8都做了哪些优化?
| 不同点 | JDK 1.7 | JDK 1.8 |
|---|---|---|
| 存储结构 | 数组 + 链表 | 数组 + 链表 + 红黑树 |
| 初始化方式 | 单独函数:inflateTable() | 直接集成到了扩容函数resize()中 |
| hash值计算方式 | 扰动处理 = 9次扰动 = 4次位运算 + 5次异或运算 | 扰动处理 = 2次扰动 = 1次位运算 + 1次异或运算 |
| 存放数据的规则 | 无冲突时,存放数组;冲突时,存放链表 | 无冲突时,存放数组;冲突 & 链表长度 < 8:存放单链表;冲突 & 链表长度 > 8:树化并存放红黑树 |
| 插入数据方式 | 头插法(先讲原位置的数据移到后1位,再插入数据到该位置) | 尾插法(直接插入到链表尾部/红黑树) |
| 扩容后存储位置的计算方式 | 全部按照原来方法进行计算(即hashCode ->> 扰动函数 ->> (h&length-1)) | 按照扩容后的规律计算(即扩容后的位置=原位置 or 原位置 + 旧容量) |
- 数组+链表改成了数组+链表或红黑树;
防止发生hash冲突,链表长度过长,将时间复杂度由O(n)降为O(logn);
- 链表的插入方式从头插法改成了尾插法,简单说就是插入时,如果数组位置上已经有元素,1.7将新元素放到数组中,新节点插入到链表头部,原始节点后移;而JDK1.8会遍历链表,将元素放置到链表的最后;
因为1.7头插法扩容时,头插法可能会导致链表发生反转,多线程环境下会产生环(死循环);
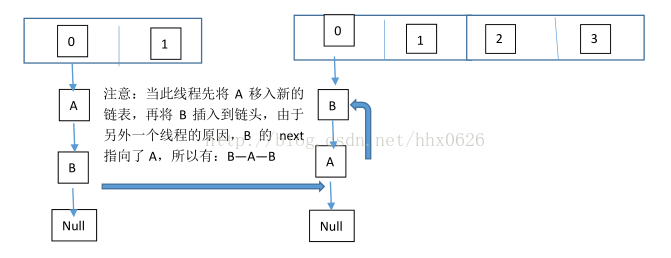
这个过程为,先将A复制到新的hash表中,然后接着复制B到链头(A的前边:B.next=A),本来B.next=null,到此也就结束了(跟线程二一样的过程),但是,由于线程二扩容的原因,将B.next=A,所以,这里继续复制A,让A.next=B,由此,环形链表出现:B.next=A; A.next=B
使用头插会改变链表的上的顺序,但是如果使用尾插,在扩容时会保持链表元素原本的顺序,就不会出现链表成环的问题了。
就是说原本是A->B,在扩容后那个链表还是A->B。
- 扩容的时候1.7需要对原数组中的元素进行重新hash定位在新数组的位置,1.8采用更简单的判断逻辑,位置不变或索引+旧容量大小;
- 在插入时,1.7先判断是否需要扩容,再插入,1.8先进行插入,插入完成再判断是否需要扩容;
链表红黑树如何互相转换?阈值多少?
链表转红黑树的阈值为:8
红黑树转链表的阈值为:6
经过计算,在hash函数设计合理的情况下,发生hash碰撞8次的几率为百万分之6,从概率上讲,阈值为8足够用;至于为什么红黑树转回来链表的条件阈值是6而不是7或9?因为如果hash碰撞次数在8附近徘徊,可能会频繁发生链表和红黑树的互相转化操作,为了预防这种情况的发生。
面试题2:HashMap是线程安全的吗?
不是线程安全的,在多线程环境下,
- JDK1.7:会产生死循环、数据丢失、数据覆盖的问题;
J* DK1.8:中会有数据覆盖的问题。
以1.8为例,当A线程判断index位置为空后正好挂起,B线程开始往index位置写入数据时,这时A线程恢复,执行写入操作,这样A或B数据就被覆盖了。
你是如何解决这个线程不安全问题的?
在Java中有HashTable、SynchronizedMap、ConcurrentHashMap这三种是实现线程安全的Map。
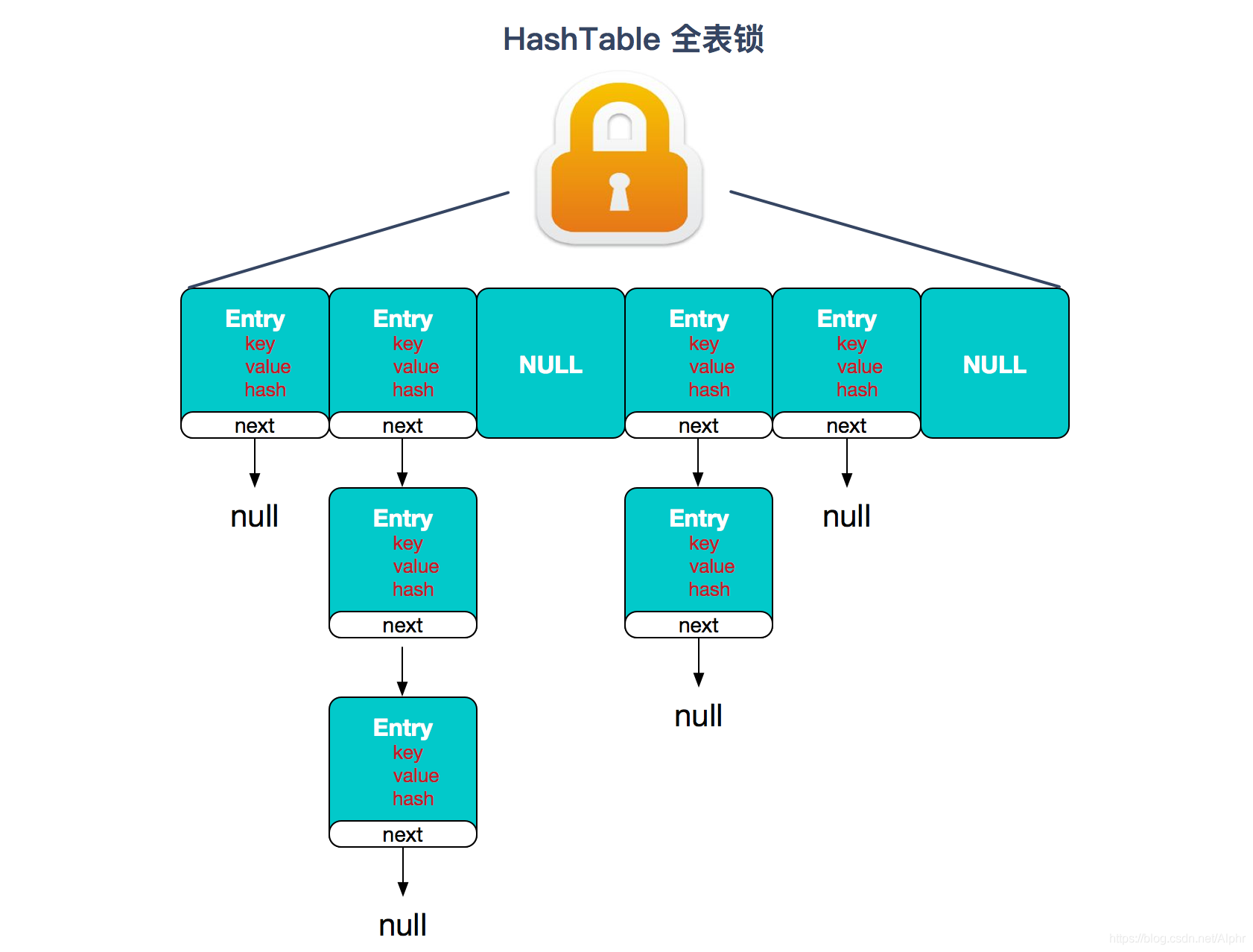
HashTable:是直接在操作方法上加synchronized关键字,锁住整个数组,粒度比较大;
SynchronizedMap:是使用Collections集合工具的内部类,通过传入Map封装出一个SynchronizedMap对象,内部定义了一个对象锁,方法内通过对象锁实现;
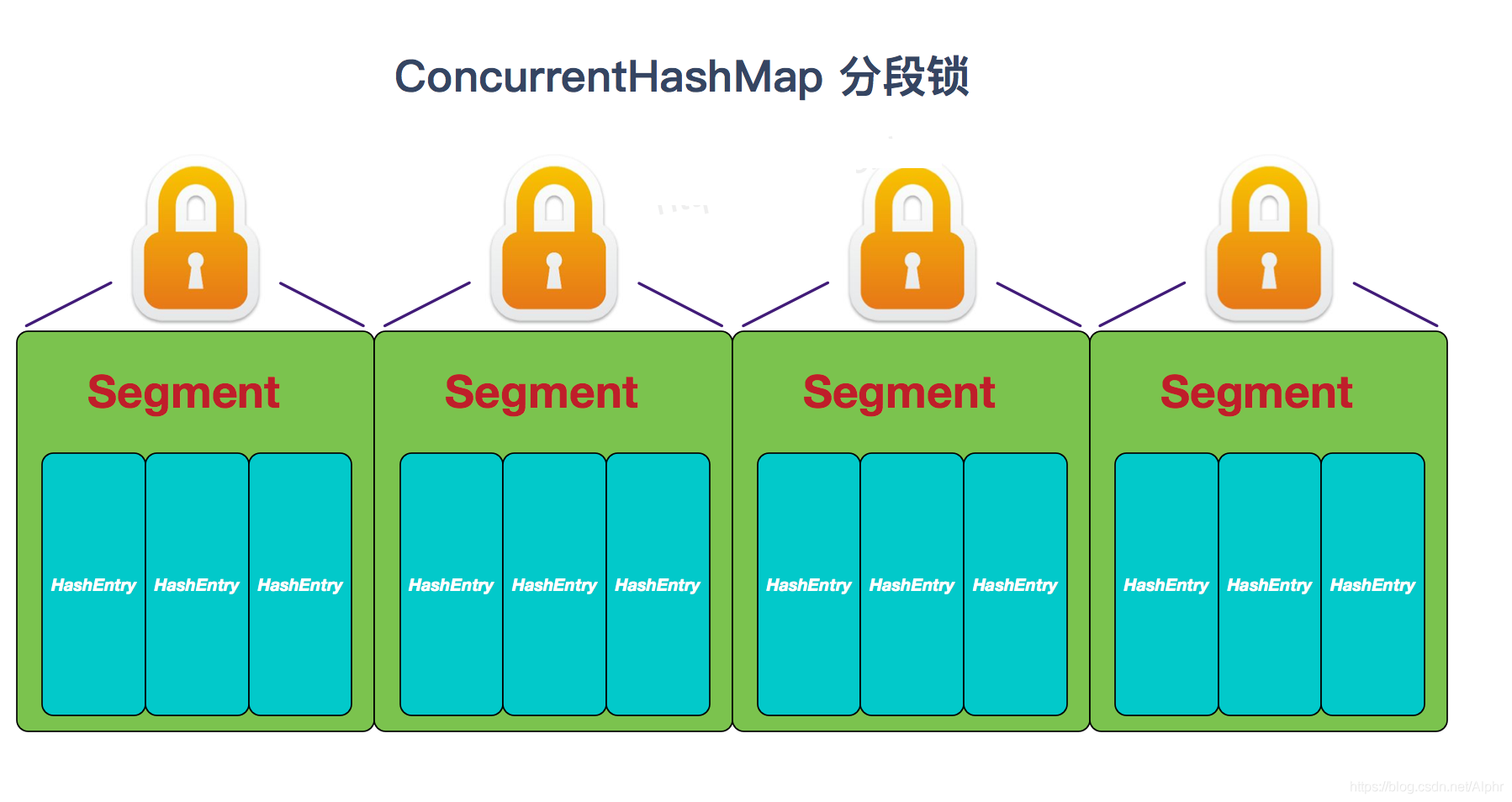
ConcurrentHashMap:使用分段锁(CAS + synchronized相结合),降低了锁粒度,大大提高并发度。
ConcurrentHashMap 底层具体实现知道吗?和Hashtable有哪些区别?
ConcurrentHashMap 和 Hashtable 的区别主要体现在实现线程安全的方式上不同。
底层数据结构: JDK1.7的 ConcurrentHashMap 底层采用 分段的数组+链表 实现,JDK1.8 采用的数据结构跟HashMap1.8的结构一样,数组+链表/红黑二叉树。Hashtable 和 JDK1.8 之前的 HashMap 的底层数据结构类似都是采用 数组+链表 的形式,数组是 HashMap 的主体,链表则是主要为了解决哈希冲突而存在的;
实现线程安全的方式:
- 在JDK1.7的时候,ConcurrentHashMap(分段锁) 对整个桶数组进行了分割分段(Segment),每一把锁只锁容器其中一部分数据,多线程访问容器里不同数据段的数据,就不会存在锁竞争,提高并发访问率。(默认分配16个Segment,比Hashtable效率提高16倍。) 到了 JDK1.8 的时候已经摒弃了Segment的概念,而是直接用 Node 数组+链表+红黑树的数据结构来实现,并发控制使用 synchronized 和 CAS 来操作。(JDK1.6以后 对 synchronized锁做了很多优化) 整个看起来就像是优化过且线程安全的 HashMap,虽然在JDK1.8中还能看到 Segment 的数据结构,但是已经简化了属性,只是为了兼容旧版本;
- Hashtable(同一把锁) :使用 synchronized 来保证线程安全,效率非常低下。当一个线程访问同步方法时,其他线程也访问同步方法,可能会进入阻塞或轮询状态,如使用 put 添加元素,另一个线程不能使用 put 添加元素,也不能使用 get,竞争会越来越激烈效率越低。
HashTable:
JDK1.7的ConcurrentHashMap:
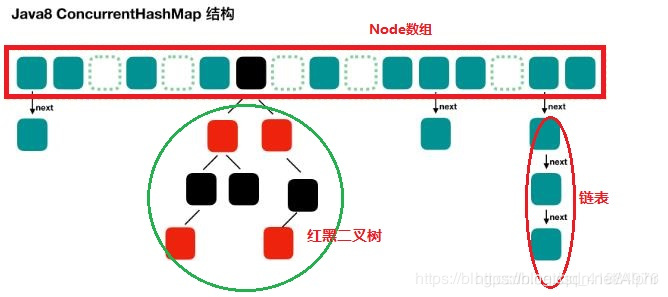
JDK1.8的ConcurrentHashMap(TreeBin: 红黑二叉树节点 Node: 链表节点):
ConcurrentHashMap 底层具体实现
JDK7:
首先将数据分为一段一段的存储,然后给每一段数据配一把锁,当一个线程占用锁访问其中一个段数据时,其他段的数据也能被其他线程访问。
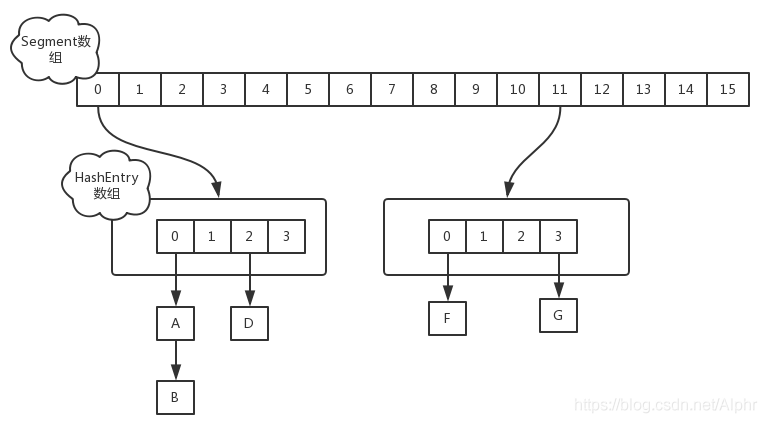
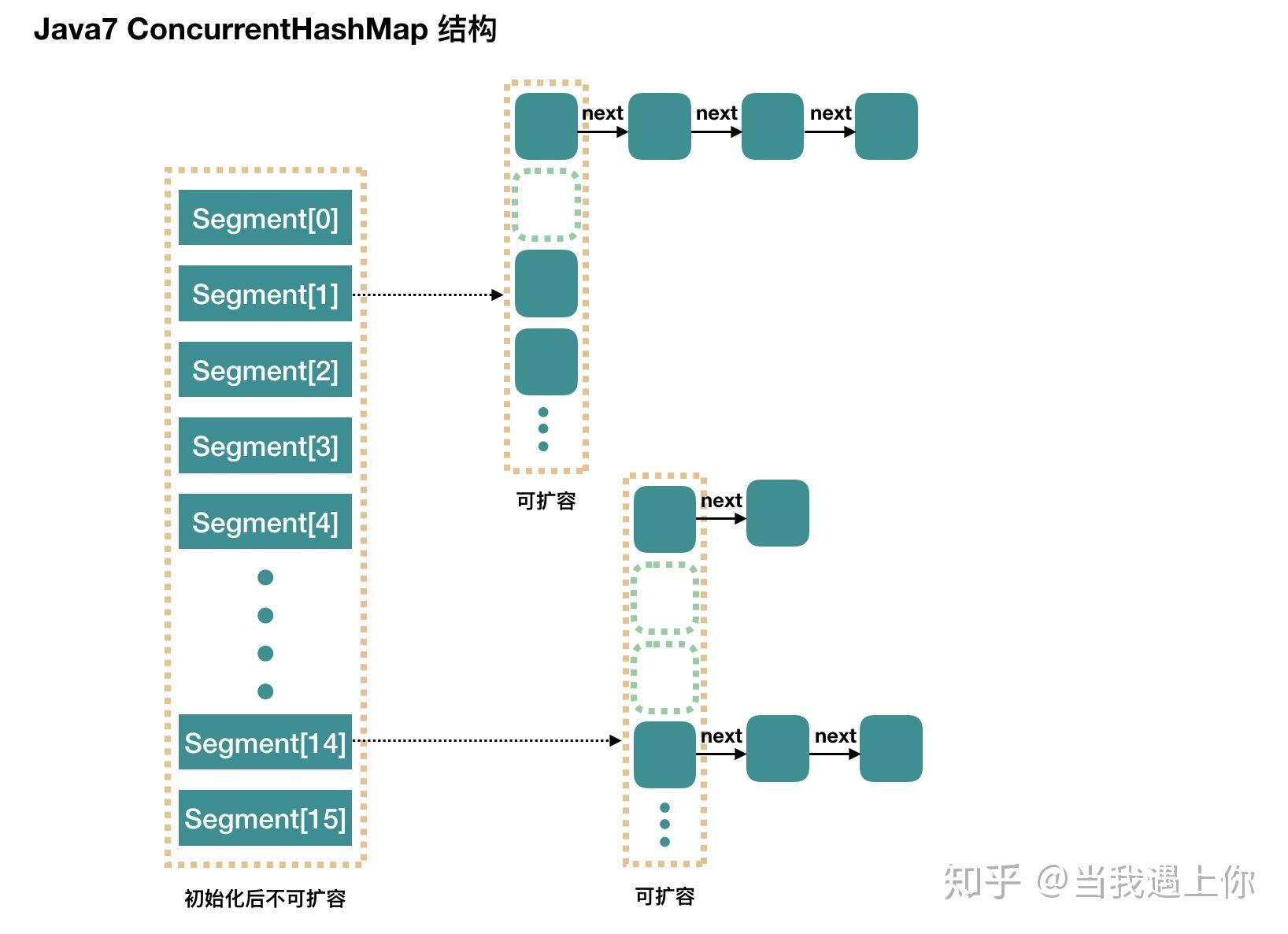
在JDK1.7中,ConcurrentHashMap采用Segment + HashEntry的方式进行实现,结构如下:
一个 ConcurrentHashMap 里包含一个 Segment 数组。Segment 的结构和HashMap类似,是一种数组和链表结构,一个 Segment 包含一个 HashEntry 数组,每个 HashEntry 是一个链表结构的元素,每个 Segment 守护着一个HashEntry数组里的元素,当对 HashEntry 数组的数据进行修改时,必须首先获得对应的 Segment的锁。
- 该类包含两个静态内部类 HashEntry 和 Segment ;前者用来封装映射表的键值对,后者用来充当锁的角色;
- Segment 是一种可重入的锁 ReentrantLock,每个 Segment 守护一个HashEntry 数组里得元素,当对 HashEntry 数组的数据进行修改时,必须首先获得对应的 Segment 锁。
JDK8:
在JDK1.8中,放弃了Segment臃肿的设计,取而代之的是采用Node + CAS + Synchronized来保证并发安全进行实现,synchronized只锁定当前链表或红黑二叉树的首节点,这样只要hash不冲突,就不会产生并发,效率又提升N倍。
你能给我说说ConcurrentHashMap分段锁的实现原理吗?
ConcurrentHashMap中put()是线程安全的。但是很多时候, 由于业务需求, 需要先 get() 操作再 put() 操作,这2个操作无法保证原子性,这样就会产生线程安全问题了。大家在开发中一定要注意。
ConcurrentHashMap的结构示意图如下:
在进行数据的定位时,会首先找到 segment, 然后在 segment 中定位 bucket。如果多线程操作同一个 segment, 就会触发 segment 的锁 ReentrantLock, 这就是分段锁的基本实现原理。
源码分析
HashEntry
HashEntry 是 ConcurrentHashMap 的基础单元(节点),是实际数据的载体。
static final class HashEntry<K,V> {
final int hash;
final K key;
volatile V value;
volatile HashEntry<K,V> next;
HashEntry(int hash, K key, V value, HashEntry<K,V> next) {
this.hash = hash;
this.key = key;
this.value = value;
this.next = next;
}
/**
* Sets next field with volatile write semantics. (See above
* about use of putOrderedObject.)
*/
final void setNext(HashEntry<K,V> n) {
UNSAFE.putOrderedObject(this, nextOffset, n);
}
// Unsafe mechanics
static final sun.misc.Unsafe UNSAFE;
static final long nextOffset;
static {
try {
UNSAFE = sun.misc.Unsafe.getUnsafe();
Class k = HashEntry.class;
nextOffset = UNSAFE.objectFieldOffset
(k.getDeclaredField("next"));
} catch (Exception e) {
throw new Error(e);
}
}
}
Segment
Segment 继承 ReentrantLock 锁,用于存放数组 HashEntry[]。在这里可以看出, 无论1.7还是1.8版本, ConcurrentHashMap 底层并不是对 HashMap 的扩展, 而是同样从底层基于数组+链表进行功能实现。
static final class Segment<K,V> extends ReentrantLock implements Serializable {
private static final long serialVersionUID = 2249069246763182397L;
static final int MAX_SCAN_RETRIES =
Runtime.getRuntime().availableProcessors() > 1 ? 64 : 1;
// 数据节点存储在这里(基础单元是数组)
transient volatile HashEntry<K,V>[] table;
transient int count;
transient int modCount;
transient int threshold;
final float loadFactor;
Segment(float lf, int threshold, HashEntry<K,V>[] tab) {
this.loadFactor = lf;
this.threshold = threshold;
this.table = tab;
}
// 具体方法不在这里讨论...
}
构造方法
public ConcurrentHashMap(int initialCapacity,
float loadFactor, int concurrencyLevel) {
if (!(loadFactor > 0) || initialCapacity < 0 || concurrencyLevel <= 0)
throw new IllegalArgumentException();
// 对于concurrencyLevel的理解, 可以理解为segments数组的长度,即理论上多线程并发数(分段锁), 默认16
if (concurrencyLevel > MAX_SEGMENTS)
concurrencyLevel = MAX_SEGMENTS;
// Find power-of-two sizes best matching arguments
int sshift = 0;
int ssize = 1;
// 默认concurrencyLevel = 16, 所以ssize在默认情况下也是16,此时 sshift = 4
// ssize = 2^sshift 即 ssize = 1 << sshift
while (ssize < concurrencyLevel) {
++sshift;
ssize <<= 1;
}
// 段偏移量,32是因为hash是int值,int值32位,默认值情况下此时segmentShift = 28
this.segmentShift = 32 - sshift;
// 散列算法的掩码,默认值情况下segmentMask = 15, 定位segment的时候需要根据segment[]长度取模, 即hash(key)&(ssize - 1)
this.segmentMask = ssize - 1;
if (initialCapacity > MAXIMUM_CAPACITY)
initialCapacity = MAXIMUM_CAPACITY;
// 计算每个segment中table的容量, 初始容量=16, 并发数=16, 则segment中的Entry[]长度为1。
int c = initialCapacity / ssize;
// 处理无法整除的情况,取上限
if (c * ssize < initialCapacity)
++c;
// MIN_SEGMENT_TABLE_CAPACITY默认时2,cap是2的n次方
int cap = MIN_SEGMENT_TABLE_CAPACITY;
while (cap < c)
cap <<= 1;
// create segments and segments[0]
// 创建segments并初始化第一个segment数组,其余的segment延迟初始化
Segment<K,V> s0 =
new Segment<K,V>(loadFactor, (int)(cap * loadFactor),
(HashEntry<K,V>[])new HashEntry[cap]);
// 默认并发数=16
Segment<K,V>[] ss = (Segment<K,V>[])new Segment[ssize];
UNSAFE.putOrderedObject(ss, SBASE, s0); // ordered write of segments[0]
this.segments = ss;
}
由图和源码可知,当用默认构造函数时,最大并发数是16,即最大允许16个线程同步写操作,且无法扩展。所以如果我们的场景数据量比较大时,应该设置合适的并发数,避免频繁锁冲突。
put()操作
public V put(K key, V value) {
Segment<K,V> s;
if (value == null)
throw new NullPointerException();
// 根据key的hash再次进行hash运算
int hash = hash(key.hashCode());
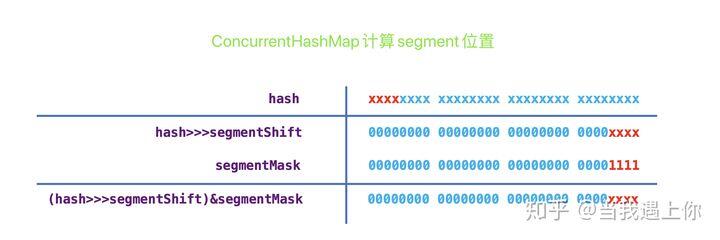
// 基于hash定位segment数组的索引。
// hash值是int值,32bits。segmentShift=28,无符号右移28位,剩下高4位,其余补0。
// segmentMask=15,二进制低4位全部是1,所以j相当于hash右移后的低4位。
int j = (hash >>> segmentShift) & segmentMask;
if ((s = (Segment<K,V>)UNSAFE.getObject // nonvolatile; recheck
(segments, (j << SSHIFT) + SBASE)) == null) // in ensureSegment
// 找到对应segment
s = ensureSegment(j);
// 将新节点插入segment中
return s.put(key, hash, value, false);
}
找出对应segment,如果不存在就创建并初始化
@SuppressWarnings("unchecked")
private Segment<K,V> ensureSegment(int k) {
// 当前的segments数组
final Segment<K,V>[] ss = this.segments;
// 计算原始偏移量,在segments数组的位置
long u = (k << SSHIFT) + SBASE; // raw offset
Segment<K,V> seg;
// 判断没有被初始化
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u)) == null) {
// 获取第一个segment ss[0]作为原型
Segment<K,V> proto = ss[0]; // use segment 0 as prototype
int cap = proto.table.length; // 容量
float lf = proto.loadFactor; // 负载因子
int threshold = (int)(cap * lf); // 阈值
// 初始化ss[k] 内部的tab数组 // recheck
HashEntry<K,V>[] tab = (HashEntry<K,V>[])new HashEntry[cap];
// 再次检查这个ss[k] 有没有被初始化
if ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))
== null) { // recheck
Segment<K,V> s = new Segment<K,V>(lf, threshold, tab);
// 自旋。getObjectVolatile 保证了读的可见性,所以一旦有一个线程初始化了,那么就结束自旋
while ((seg = (Segment<K,V>)UNSAFE.getObjectVolatile(ss, u))
== null) {
if (UNSAFE.compareAndSwapObject(ss, u, null, seg = s))
break;
}
}
}
return seg;
}
segment插入节点
上一步找到segment位置后计算节点在segment中的位置。
final V put(K key, int hash, V value, boolean onlyIfAbsent) {
// 是否获取锁,失败自旋获取锁(直到成功)
HashEntry<K,V> node = tryLock() ? null :
scanAndLockForPut(key, hash, value); // 失败了才会scanAndLockForPut
V oldValue;
try {
HashEntry<K,V>[] tab = table;
int index = (tab.length - 1) & hash;
// 获取到bucket位置的第一个节点
HashEntry<K,V> first = entryAt(tab, index);
for (HashEntry<K,V> e = first;;) {
// hash冲突
if (e != null) {
K k;
// key相等则覆盖
if ((k = e.key) == key ||
(e.hash == hash && key.equals(k))) {
oldValue = e.value;
if (!onlyIfAbsent) {
e.value = value;
++modCount;
}
break;
}
// 不相等则遍历链表
e = e.next;
}
else {
if (node != null)
// 将新节点插入链表作为表头
node.setNext(first);
else
// 创建新节点并插入表头
node = new HashEntry<K,V>(hash, key, value, first);
int c = count + 1;
// 判断元素个数是否超过了阈值或者segment中数组的长度超过了MAXIMUM_CAPACITY,如果满足条件则rehash扩容!
if (c > threshold && tab.length < MAXIMUM_CAPACITY)
// 扩容
rehash(node);
else
setEntryAt(tab, index, node);
++modCount;
count = c;
oldValue = null;
break;
}
}
} finally {
// 解锁
unlock();
}
return oldValue;
}
如果加锁失败则先走 scanAndLockForPut() 方法。
private HashEntry<K,V> scanAndLockForPut(K key, int hash, V value) {
// 根据hash获取头结点
HashEntry<K,V> first = entryForHash(this, hash);
HashEntry<K,V> e = first;
HashEntry<K,V> node = null;
int retries = -1; // negative while locating node
// 尝试获取锁,成功就返回,失败就开始自旋
while (!tryLock()) {
HashEntry<K,V> f; // to recheck first below
if (retries < 0) {
// 如果头结点不存在
if (e == null) {
if (node == null) // speculatively create node
node = new HashEntry<K,V>(hash, key, value, null);
retries = 0;
}
// 和头结点key相等
else if (key.equals(e.key))
retries = 0;
else
// 下一个节点 直到为null
e = e.next;
}
// 达到自旋的最大次数
else if (++retries > MAX_SCAN_RETRIES) {
// lock()是阻塞方法。进入加锁方法,失败进入队列,阻塞当前线程
lock();
break;
}
// TODO (retries & 1) == 0 没理解
else if ((retries & 1) == 0 &&
(f = entryForHash(this, hash)) != first) {
// 头结点变化,需要重新遍历,说明有新的节点加入或者移除
e = first = f; // re-traverse if entry changed
retries = -1;
}
}
return node;
}
本文由 新·都在 原创,采用 CC BY-NC-SA 4.0 许可协议,转载请注明出处。



